Kulya 4.0 {battery}
HEXAPOD Kulya 4.0
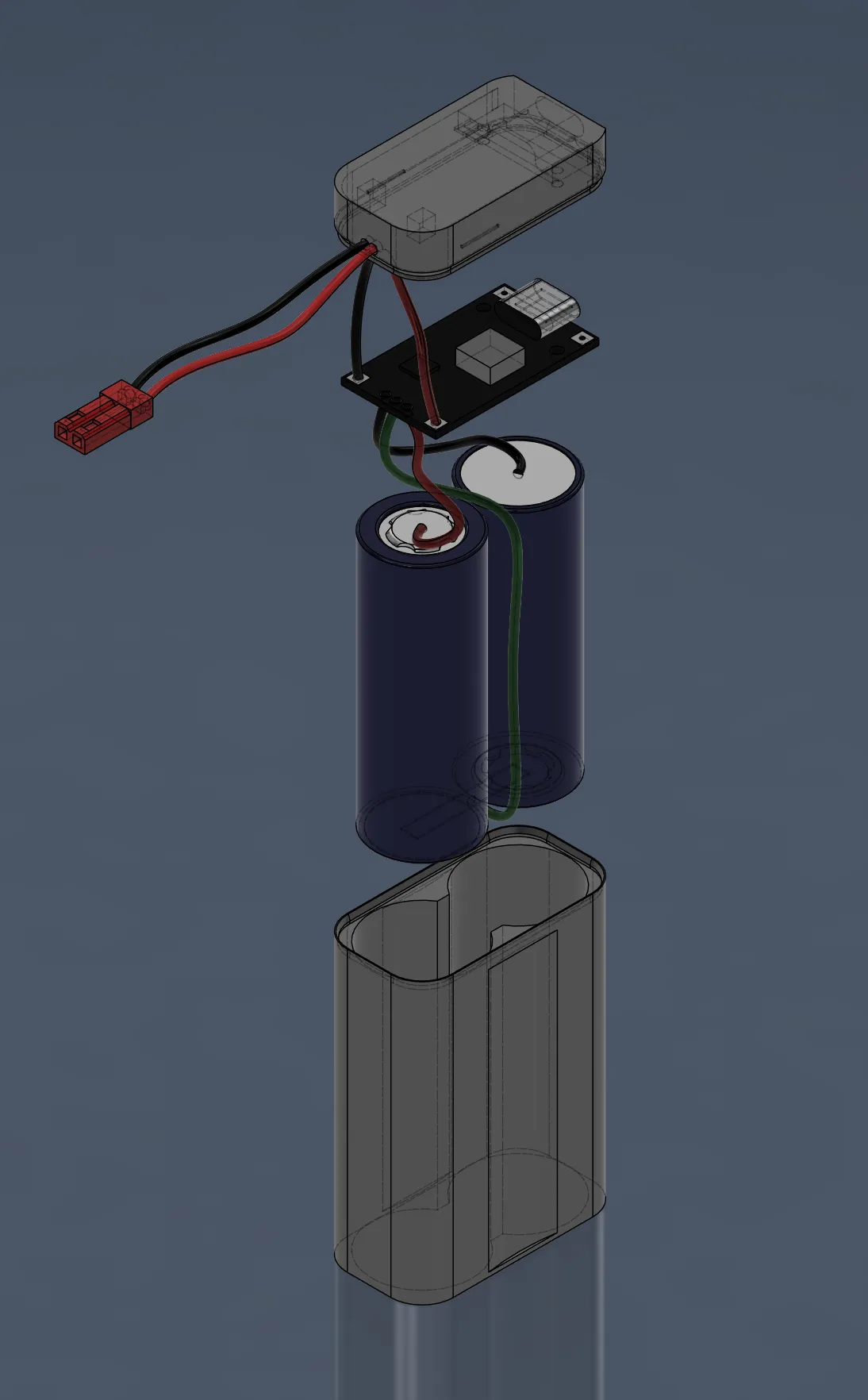
The robot becomes mobile when it receives its own power source. In this DIY, we will assemble a lithium-ion battery module with a BMS — a system for balancing and protection.
A battery is a separate engineering system that requires precision and responsibility, so do not neglect safety rules.
A battery is a separate engineering system that requires precision and responsibility, so do not neglect safety rules.
0
people already downloaded this DIY


.png)